Kia Rio: Body Electrical System / Rear Parking Assist System
Specifications
| Specification |
|
Item |
Specification |
|
|
Ultrasonic sensor |
Voltage rating |
DC 12V |
|
Detecting range |
11.8 - 47.2 in (30 - 120 cm) |
|
|
Operation voltage |
DC 9 - 16 V |
|
|
Operation current |
MAX 350 mA |
|
|
Operating temperature |
-22 - 176°F (-30 - 80°C) |
|
|
Operating frequency |
48 ± 5 kHz |
|
|
Number of sensors |
4 EA |
|
Components and components location
| Component Location |
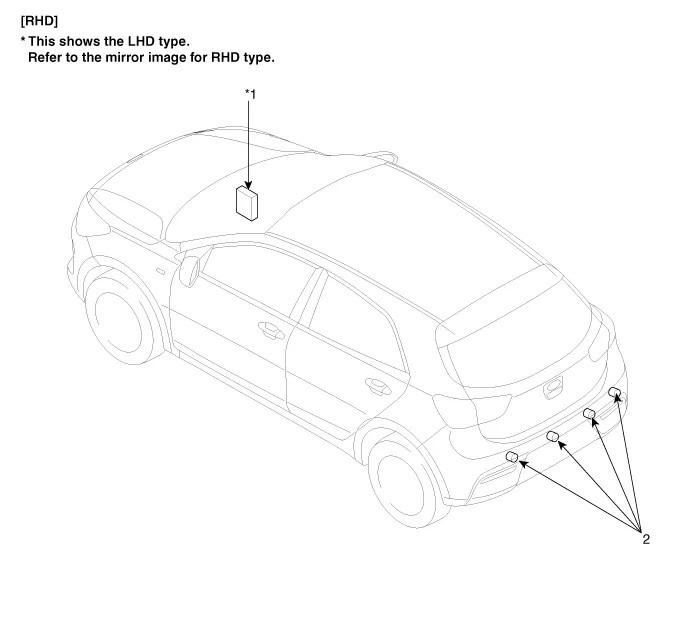
| 1. Body Control Module (BCM)
|
2. Ultrasonic sensor |
Rear parking assist control unit function is built in BCM (Body Control Module). |

Description and operation
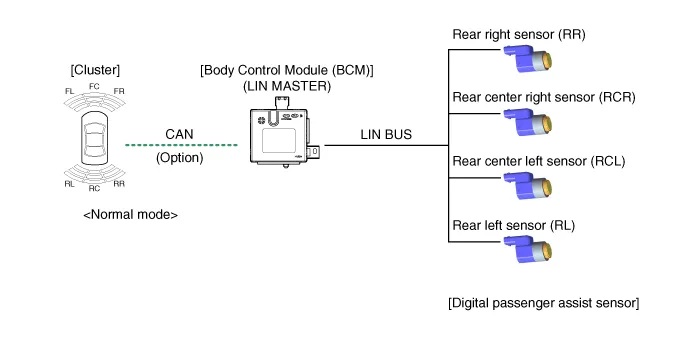
| System Overview |
RPAS (Rear Parking Assist System) is an electronic driving aid that warns the driver to be cautious while parking or driving at low speed. The sensor uses ultrasonic waves to detect objects within proximity of the vehicle.
RPAS consists of four RPAS sensors which are detecting the obstacles and transmit the result separated into three warning levels, the first, second and third to BCM by Lin communication. BCM decides the alarm level by the transmitted communication message from the slave sensors, and then operates the buzzer or transmits the data for display.
System Operation Specification.
| 1. |
INIT mode
|
| 2. |
NORMAL Mode
|
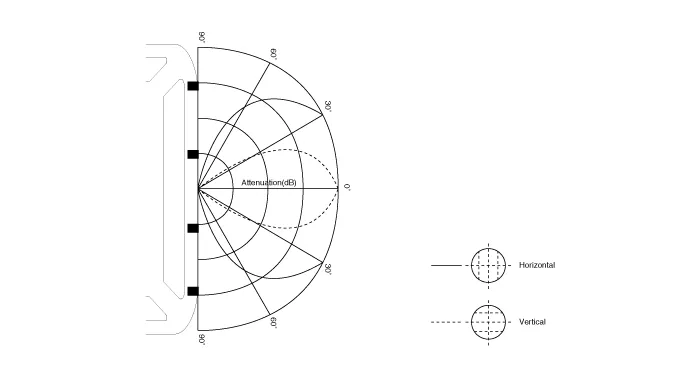
Sensing Area
| 1. |
Measurement condition – PVC pole (diameter 75mm, length 1m), normal temperature |
| 2. |
Distance range detected objects (Measured directly in front of sensor) 61cm(24.0in) - 120cm(47.2in) : ± 15cm(5.9in) 31cm(12.2in) - 60cm(23.6in): ± 15cm(5.9in) Less than 30cm(11.8in) : ± 10cm(3.9in) |
Horizontal Sensing Area

Vertical Sensing Area
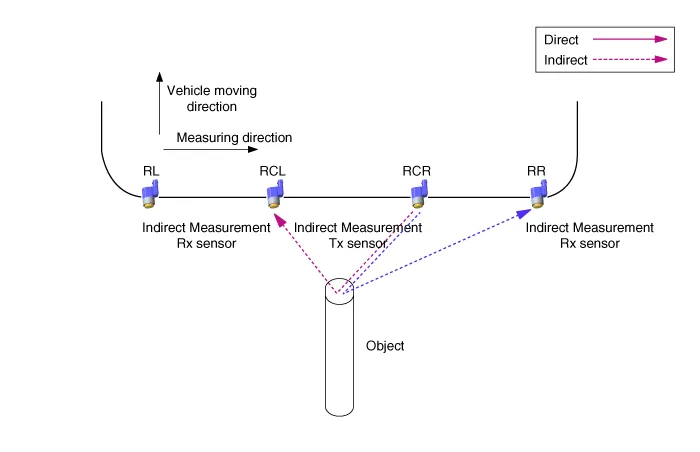
Distance Measurement
| Direct Measurement |
Transmission and Reception are executed with one sensor
(RL, RCL, RCR, RR each sensor execution)
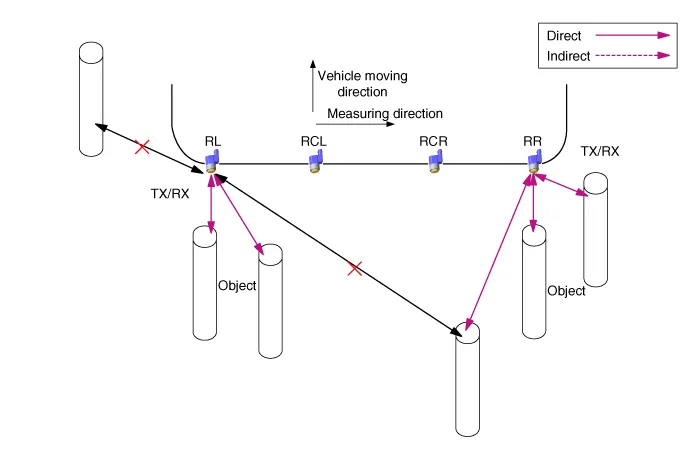
| Indirect Measurement |
(RCL → RL, RCL → RCR, RCR → RCL, RCR → RR Execution in order)
With two or three sensors, one of them sends the transmission and the others get the reception.
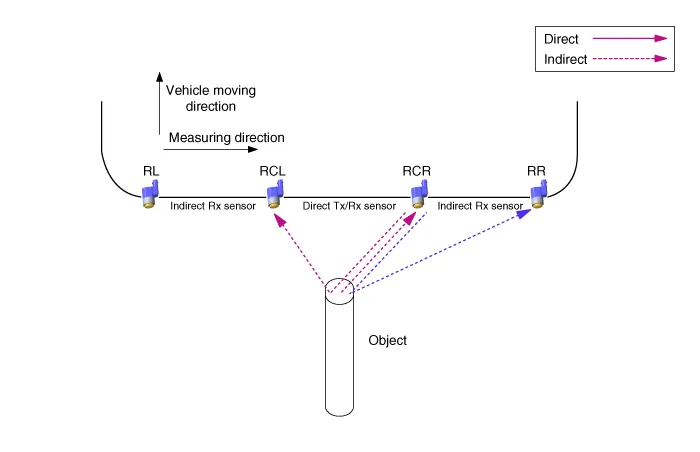
| Direct and Indirect Measurement at once |
With two or three sensors, the one sensor performs both transmission and reception, and the others perform only reception.
RPAS alarm system
When the RPAS sensor detects the object, warning is operated by audible alarm device as like buzzer. RPAS sensor sends data to BCM via LIN communication and BCM implements audible warning for each RPAS SENSOR by priority. And it performs a role of gateway only when it sends visible alarm device such as Cluster.
| – |
Sensor buzzer/display information processing method of BCM In case of RL/RR sensor information, the BCM handles each sensor information directly about Display and buzzer output function. Buzzer output of CL/CR sensor, BCM handles center combination information by priority both sensor. |
System Operation Spec
When the system has the power (after IGN ON and R gear), MICOM checks every sensor channel. In case it finds any error, it gives off the buzzer for 300ms after 500ms.If an error is found even in a sensor, it gives off the buzzer corresponding to the faulty sensor, instead of initial starting alarm. The operation to enter the normal mode is as follows.
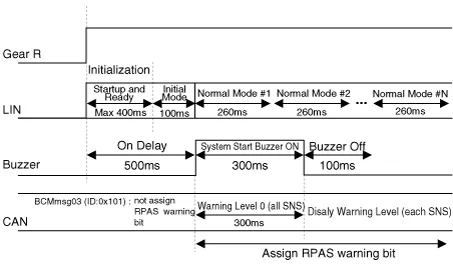
With the R gear put in the car, the system is operated as follows.
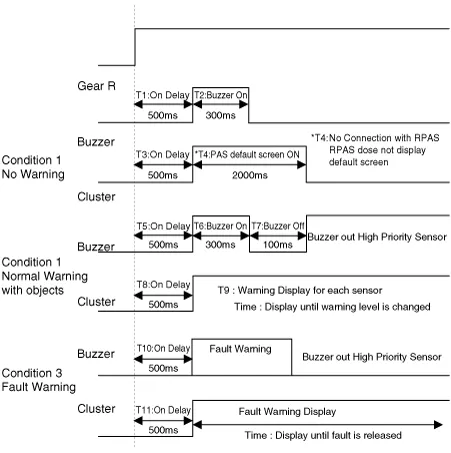
With the R gear released, the system is operated as follows.
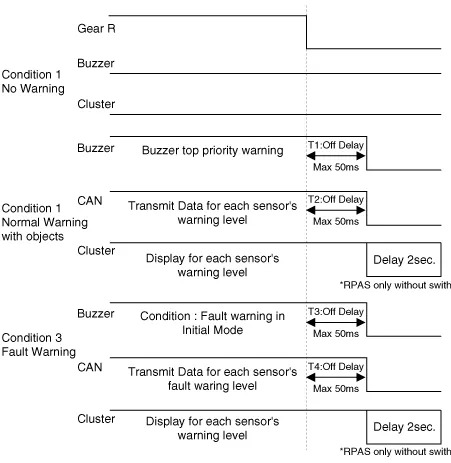
※ The acceptable error range on waveform is ±10%.
Alarm Output Specification classified by distance between sensors
Condition logic according to priority of alarm level is as below. (the identical sensor)
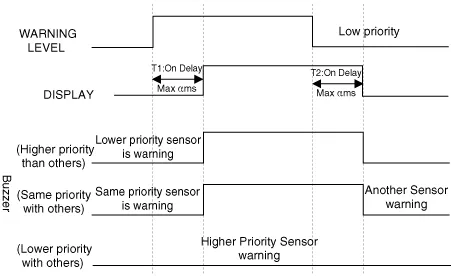
*α value definition
| 1. |
low priority sensor off : α = 0ms |
| 2. |
low priority sensor is 1st warning level : α < 340ms |
| 3. |
low priority sensor is 2nd warning level : α < 170ms |
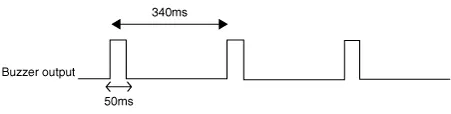
*β value definition
| 1. |
low priority sensor is 1st warning level : β = 1700ms |
| 2. |
low priority sensor is 2nd warning level : β = 1700ms |
| 3. |
low priority sensor is 3rd warning level : β = 700ms |
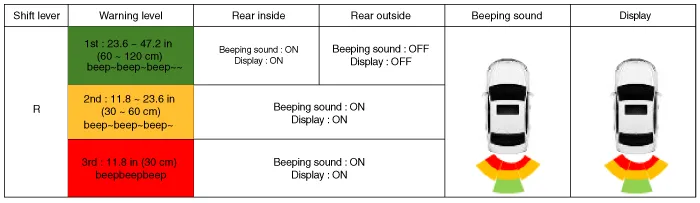
Alarm control by sensing distance is as follows.
| 1. |
First warning area (31.9 in (81 cm) - 47.2 in (120 cm) )
|
| 2. |
Second warning area (16.1 in (41 cm) - 31.5 in (80 cm) )
|

| 3. |
Third warning area (less than 15.7 in (40 cm))
|

Visible Alarm Indicator Specification
When the gear shifts to R, the cluster controls the indicator as the following picture.
When the system detects an object, it immediately turns on the indicator. If an object disappears while the RPAS detecting operation, the indicator remains on for 2 sec. before being turned off.
(But when it turns third step alarm to No alarm status, it lights third step alarm for two second and turns out.)
| – |
It shows only the detecting position of obstacles. |
| – |
In third level alarm, indicator flickers at intervals of a second. |
| – |
In normal alarm mode, integrated display of RCR/RCL |
Communication Standard
This section defines the communication between RPAS and BCM.
RPAS send a detecting result of object and sensor diagnosis result to BCM according to this document, and BCM takes a role to issue an alarm.
Indicator shows the transmitted position and alarm data, in the alarm mode, it finds the nearest DATA and alarms the nearest DATA first.
(Ex. In case, RL isthe first-step alarm and RR is the third step, RR alarm has priority.)
Repair procedures Inspection 1. With the washer motor connected to the reservoir tank, fill the reservoir tank with water.
Components and components location Components Repair procedures Removal 1. Disconnect the negative (-) battery terminal.
Other information:
Kia Rio 2017-2023 YB Service Manual: Lane Departure Warning System (LDWS)
Components and components location Components 1. LDWS ON/OFF switch 2. Instrument cluster 3. LDWS unit (MFC) ※ MFC : Multi Function Camera – Function : LDWS, HBA, AEB Description and operation Description System block diagram Components of LDWS
Kia Rio 2017-2023 YB Service Manual: Cluster Ionizer (FATC only)
Description and operation Description The cluster ionizer helps to clean up odors in the vehicle or from the air-conditioner system. When the ignition switch ON, the inoizer runs a "CLEAN" mode and then a "ION" mode, switching every about 15 minutes.
Categories
- Manuals Home
- Kia Rio Owners Manual
- Kia Rio Service Manual
- Brake System
- Engine Control / Fuel System
- Maintenance
- New on site
- Most important about car
